OpenModelicaを用いたPID制御パラメータ決定#
目的#
Advance/JIANT と OpenModelica を利用して PID 制御において適切なパラメータを決定します。求めるパラメータは、2つ(inertia1、目標速度)の決定係数 です。
対象モデル概要#
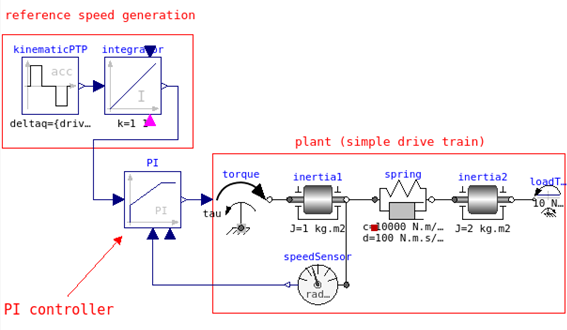
バネマスダンパーを特定の位置に保持する PID 制御モデルです。 ここでは、OpenModelica の標準ライブラリ内の Modelica.Blocks.Examples.PID_Controller モデルを使用します。
設計基準#
入力パラメータ#
| 表示名 | キー名 | 単位 | 標準値 |
|---|---|---|---|
| Inertia1のモーメント | inertia1.J | kg.m2 | 1 |
| Inertia2のモーメント | inertia2.J | kg.m2 | 1 |
| バネ抵抗 | spring.c | N.m/rad | 10000 |
| ダンピング定数 | spring.d | N.m.s/rad | 100 |
| 微分周波数 | PI.Td | s | 0.1 |
| 積分周波数 | PI.Ti | s | 0.1 |
| 入力制御信号の上限値 | PI.limiter.uMax | - | 12 |
| 入力制御信号の下限値 | PI.limiter.uMin | - | -12 |
製品パラメータの水準設定#
| No. | 表示名 | キー名 | 単位 | 水準1 | 水準2 | 水準3 |
|---|---|---|---|---|---|---|
| 1 | Inertia1のモーメント | inertia1.J | kg.m2 | 0.5 | 1 | 1.5 |
| 2 | Inertia2のモーメント | inertia2.J | kg.m2 | 0.5 | 1 | 1.5 |
| 3 | バネ抵抗 | spring.c | N.m/rad | 5000 | 10000 | 15000 |
| 4 | ダンピング定数 | spring.d | N.m.s/rad | 50 | 100 | 150 |
運用パラメータの水準設定#
| No. | 表示名 | キー名 | 単位 | 水準1 | 水準2 | 水準3 |
|---|---|---|---|---|---|---|
| 1 | 微分周波数 | PI.Td | s | 0.001 | 0.01 | 0.1 |
| 2 | 積分周波数 | PI.Ti | s | 0.001 | 0.01 | 0.1 |
| 3 | 入力制御信号の上限値 | PI.limiter.uMax | - | 11 | 12 | 13 |
| 4 | 入力制御信号の下限値 | PI.limiter.uMin | - | -13 | -12 | -11 |
評価結果#
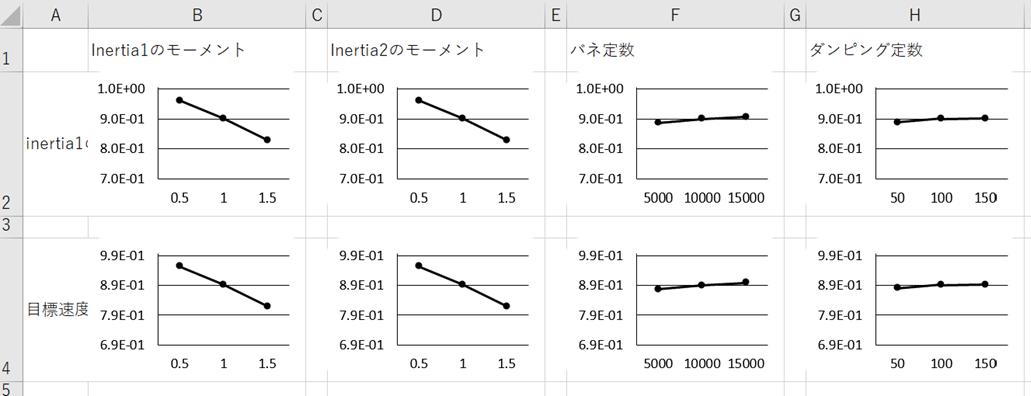
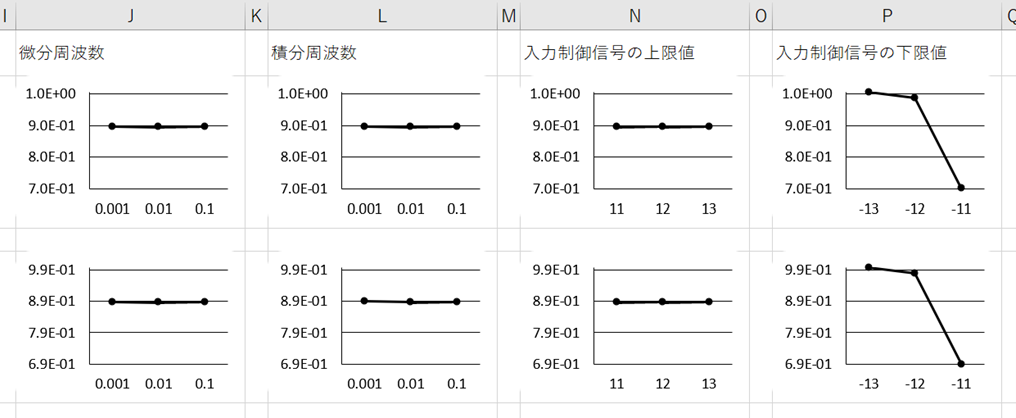
Advance/JIANT により、8つのパラメータに対する2つの決定係数の感度を求めることができました。
関連ページ#
- 品質工学ツール Advance/JIANT
- 産業分野:自動車・運輸
- 産業分野:航空宇宙
- 解析分野:AI・品質工学